
Ya en 2010 mis alumnos traían videos del BigDog para las asignaciones de eventos actuales. Basado en la idea de que más de la mitad de la Tierra es inaccesible a los vehículos de ruedas Boston Dynamics trabajado para crear un robot que podía caminar en cualquier lugar. El robot trató de copiar las piernas multi-articulados de animales para permitir un mayor cumplimiento cerca del suelo y más activación en la parte superior de las piernas.
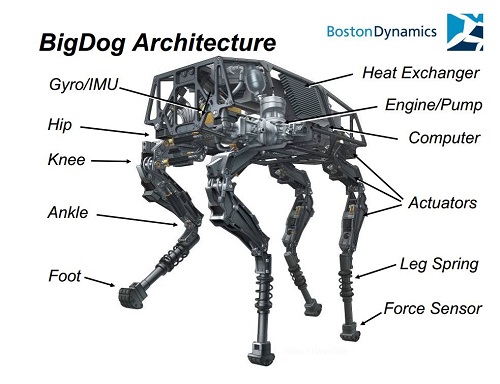
Algoritmos de control complejos permiten BigDog para seguir un humano con marcadores reflectantes a través del campo a una distancia fija. La posición de los controles de la máquina en los ejes X, Y y Z, y también a través de los controles de balance, cabeceo y guiñada. A un cilindro, dos tiempos motor de karts da la BigDog aproximadamente 15 caballos de fuerza. Existe una amplia variedad de sensores de análisis y posición, voltaje de la batería, la presión, la temperatura del motor, los ángulos y las fuerzas de la junta de control.
No hay comentarios:
Publicar un comentario