
- Concepto de robótica
- Historia de las tres leyes de robótica
- La prehistoria
- Desarrollo histórico
- Robots, autómatas y simples máquinas
- Arquitectura de un robot
- La fuerza y movimiento del robot
- El sistema nervioso
- El mercado de los robots
- Aplicaciones industriales
- Contexto actual de la Robótica
- Conclusión
- Bibliografía
- Anexo
1. Introducción
No hay solución posible. Cuando se habla de robótica con alguien, casi se puede ver en los ojos del interlocutor la imagen e C3PO hablando sin parar cuatrocientos idiomas a la vez y corriendo de un lado para otro delante o detrás del Jedi de turno.
Aunque las películas y novelas de ciencias ficción han logrado que la robótica comience a interesar a una cantidad cada vez más numerosa de personas, por desgracia la robótica actual dista mucho de haber evolucionado hasta el punto que se nos mostraba en la trilogía de "La guerra de las galaxias".
En este proyecto vamos a intentar dar un repaso a la situación actual de la robótica, así como a analizar los distintos componentes de un robot y los diferentes tipos de robot que se pueden encontrar en la actualidad.
La Robótica es una ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia. Las ciencias y tecnologías de las que deriva podrían ser: el álgebra, los autómatas programables, las máquinas de estados, la mecánica o la informática.
De forma general, la Robótica se define como: El conjunto de conocimientos teóricos y prácticos que permiten concebir, realizar y automatizar sistemas basados en estructuras mecánicas poli articuladas, dotados de un determinado grado de "inteligencia" y destinados a la producción industrial o al sustitución del hombre en muy diversas tareas.
Un sistema Robótico se puede describirse, como "Aquel que es capaz de recibir información, de comprender su entorno a través del empleo de modelos, de formular y de ejecutar planes, y de controlar o supervisar su operación". La Robótica es esencialmente pluridisciplinaria y se apoya en gran medida en los progresos de la microelectrónica y de la informática, así como en los de nuevas disciplinas tales como el reconocimiento de patrones y de inteligencia artificial.
La historia de la Robótica ha estado unida a la construcción de "artefactos", muchas veces por obra de genios autodidactas que trataban de materializar el deseo humano de crear seres semejantes a nosotros que nos descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su torpedo automóvil mediante telegrafía sin hilodrecista automático, el primer trasbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos.
Si algún autor ha influido sobre manera en la concepción del universo de los robots de ficción, éste ha sido sin duda alguna Isaac Asimos. Muchos otros, desde luego, han escrito sobre robots, pero ninguno ha relatado tan minuciosamente las actitudes y posibilidades de estas máquinas como lo ha hecho él.
Tanto es así, que el Oxford English Dictionary reconoce a Asimos como inventor de la palabra "robótica" y, aunque todos conocemos la facilidad de los anglófonos para inventar palabras nuevas, no por ello tiene mucho mérito.
Cuando tenía 22 años, Asimos escribió su cuarto relato corto sobre robots. El círculo vicioso. En boca de unos de sus personajes planteó lo que consideraba axiomas básicos para el funcionamiento de un robot. Los llamó las Tres reglas fundamental de la robótica y dicen así:
- Ningún robot puede hacer daño a un ser humano, o permitir que se le haga daño por no actuar.
- Un robot debe obedecer las órdenes dadas por un ser humano, excepto si éstas órdenes entran en conflicto con la primera ley.
- Un robot debe proteger su propia existencia en la medida en que está protección no sea incompatible con las leyes anteriores.
En definitiva, las famosas leyes de Asimos son aplicables a un universo donde los robots son seres inteligentes, pero quedan relegadas a una cartilla de parvulario al enfrentarse con la dura realidad. Pero esto son sólo anécdotas.
Los primeros Robots construidos, en la tierra, eran modelos poco avanzados. Era una época en donde la Robopsicología no estaba muy bien desarrollada. Estos Robots podían ser enfrentados a situaciones en las cuales se vieran en un conflicto con sus leyes. Una de las situaciones más sencillas se da cuando un Robot debe dañar a un ser humano para evitar que dos o más sufran daño. Aquí los Robots decidían en función de un criterio exclusivamente cuantitativo, quedando luego inutilizados, al verse forzados a violar la primera ley.
Posteriores desarrollos en la Robótica, permitieron la construcción de circuitos más complejos, y por ende, con una mayor capacidad de autorreflexión. Una peculiaridad de los Robots es que pueden llegar a redefinir su concepto de "daño" según sus experiencias e incluso, llegar a determinar niveles de éste. Su valoración de los seres humanos también puede ser determinada por el ambiente.
Es así que un Robot puede llegar a dañar a un ser humano por proteger a otro que considere de más valía (su amo por ejemplo). También podría darse el caso de que un Robot dañara físicamente a un ser humano para evitar que otro sea dañado psicológicamente, pues llega a ser una tendencia el considerar los daños psicológicos más graves que los físicos.
Estas situaciones nunca se hubieran dado en Robots más antiguos. Asimov plantea en sus historias de Robots las más diversas situaciones, siempre considerando las posibilidades lógicas que podrían llevar a los Robots a tales situaciones.
Uno puede llegar a encariñarse con los Robots de Asimov, él que nos muestra en sus historias Robots cada vez más "humanos". En El hombre bicentenario, Asimov nos narra la historia de Andrew Martín, nacido Robot, y que luego de una vida de lucha, logró morir como un ser humano. Están también R. Daneel Olivaw y R. Giskard Reventlov, los cuales tienen un papel fundamental en la segunda expansión de los seres humanos y la posterior fundación del imperio galáctico. Estos dos personajes son importantes en la medida en que, siendo los Robots más complejos jamás creados, fueron capaces de desarrollar la ley cero de la Robótica (Zeroth law):
"Un Robot no puede hacer daño a la humanidad o, por inacción, permitir que la humanidad sufra daño."
Se supone que la Ley Cero sería el resultado de la reflexión filosófica por parte de estos Robots más sofisticados.
R Giskard muere luego de tener que dañar a un ser humano en virtud de la ley cero. El problema fundamental de esta ley está en el problema para definir "humanidad", así como para determinar qué "daña" a la humanidad. R. Daneel logró asimilar la ley cero gracias al sacrificio de Giskard, convirtiéndose desde entonces en el protector de la humanidad. Daneel se convierte en uno de los personajes más importantes del ciclo de Trántor (formado por los cuentos y novelas de Robots, las novelas del imperio, y la saga de las fundaciones: 17 libros) siendo además el punto que le da continuidad.
La Robótica abre una nueva y decisiva etapa en el actual proceso de mecanización y automatización creciente de los procesos de producción. Consiste esencialmente en la sustitución de máquinas o sistemas automáticos que realizan operaciones concretas, por dispositivos mecánicos que realizan operaciones concretas, por dispositivos mecánicos de uso general, dotados de varios grados de libertad en sus movimientos y capaces de adaptarse a la automatización de un número muy variado de procesos y operaciones.
La Robótica se ha caracterizado por el desarrollo de sistemas cada vez más flexibles, versátiles y polivalentes, mediante la utilización de nuevas estructuras mecánicas y de nuevos métodos de control y percepción.
La Robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico. Sin embargo, algunas cosas que para los humanos son muy sencillas, como andar, correr o coger un objeto sin romperlo, requieren una potencia de cálculo para igualarlas que no esta disponible todavía.
Sin embargo se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial y otras ciencias paralelas nos permitan acércanos un poco más cada vez a los milagros soñados por los primeros ingenieros y también a los peligros que nos adelanta la ciencia ficción.
La palabra Robot surge con la obra RUR, los "Robots Universales de Rossum" de Carel Capee, es una palabra checoslovaca que significa trabajador, sirviente. Sin embargo podemos encontrar en casi todos los mitos de las diversas culturas una referencia a la posibilidad de crear un ente con inteligencia, desde el Popol-Vuh de nuestros antepasados mayashasta el Golem del judaísmo.
Desde la época de los griegos se intentó crear dispositivos que tuvieran un movimiento sin fin, que no fuera controlado ni supervisado por personas, en los siglos XVII y XVIII la construcción de autómatas humanoides fabricados con mecanismos de relojería por Jacques de Vaucanson, Pierre Henri-Louis, Jaquet- Droz, como el escribiente, the Draughtsman, el músico Henri Maillar det (1800), Olimpia de la ópera de Offenback de Hoffman, fortalecieron la búsqueda de mecanismos que auxiliaran a los hombres en sus tareas.
Estos autómatas desataron controversias alrededor de la posible inteligencia que pudieran tener estos dispositivos pesadas y en la búsqueda de la posibilidad de crear vida artificialmente. El escribiente hacía mofa de la frase de Descartes de "Pienso luego existo parafraseándola al escribir "Escribo luego existo". Los fraudes surgieron como en el caso del ajedrecista, en el que un muñeco mecánico daba respuesta a jugadas de ajedrez, comprobándose más tarde que era un enano encerrado en la caja del muñeco el que daba las respuestas y movía el muñeco. Todos estos mitos anteceden a la obra Kapec, en la que se plantea la construcción de Robots para liberar a las personas de la carga pesada de trabajo . Sin embargo, esta ficción y la creada por Asimov, junto con los desarrollos mecánicos de máquinas como el telar de Thaillard, motiva a George Devol a crear el origen de los Robots industriales, un manipulador que sería parte de una célula de trabajo.
. Sin embargo, esta ficción y la creada por Asimov, junto con los desarrollos mecánicos de máquinas como el telar de Thaillard, motiva a George Devol a crear el origen de los Robots industriales, un manipulador que sería parte de una célula de trabajo.
Desde los primeros autómatas hasa las sondas espaciales han pasado varios siglos, pero al hablar de inteligencia sólo podremos mirars unos treinta años atrás. Han sido pocos años, pero muy intensos y el interés que ha despertado en todo el mundo es superior a cualquier previsión que se pudiera formular en su nacimiento y concepción inicial, siguiendo un proceso paralelo a la introducción de las computadoras en las actividades cotidianas de la vida humana, aunque si bien los Robots todavía no han encontrado la forma de inserción en los hogares pero sí son un elemento ya imprescindible en la mayoría de las industrias.
Podemos contemplar la Robótica como una ciencia que, aunque en ella se han conseguido grandes avances, ofrece aun un amplio campo para el desarrollo y la innovación tecnológica y es precisamente este aspecto el que motiva a muchos investigadores y aficionados a los Robots a seguir adelante planteando Robots cada vez mas evolucionados y complejos.
Los aficionados a los Robots también juegan un papel muy importante en el desarrollo de la Robótica, ya que son éstos los que, partiendo de una afición firme, con sus particulares ideas y al cabo de un cierto tiempo de pruebas y progresos, han podido desarrollar sus teorías y, con ello, crear precedentes o mejorar aspectos olvidados, así como solucionarproblemas no previstos inicialmente.
5.1 El monje cibernético
El primer autómata digno de mención del que noticias existen, se cree que fue construido por Giovanni Torriani durante la primera mitad del siglo XVI. El invento, que simula la figura de un monje de la época, funcionaba mediante un mecanismo de resorte al que se le daba cuerda con una llave.
El monje era capaz de girar e inclinar la cabeza, mover los ojos de un lado para otro, abrir la boca ygolpearse el pecho con la mano derecha mientras subía y bajaba la izquierda.
5.2 El pato que evacuaba
El pato automático de Jacques Vaucanso, invento mecánico se construyó en 1738 con el propósito venerable de recaudar dinero para su inventor.
El patito, construido en cobre puro y duro, no sólo graznaba, se bañaba y bebía agua sino que comía grano, lo digería y, aún no contento, lo evacuaba.
Tras andar perdido durante treinta y tantos años, un suizo llamado Reichsteiner logró hallarlo y reconstruir sus más de 4000 piezas. Después de su debut en la Scala de Milán ya en el siglo pasado, el animalito volvió a perderse y hoy en día su paradero es un misterio.
5.3 La muñeca escribana
Fue a principios del siglo pasado cuando un mecánico llamado Maillardet creó un autómata capaz de escribir. La aplicada máquina, de apariencia femenina, podía escribir en inglés y francés y además hasta dibujaba paisajes.
Unos años más tarde la autómata escribana quedó destruida y en 1812 se reconstruyó con una nueva identidad y pasó a ser conocida como "La muñeca de Filadelfia".
5.4 Primeras aproximaciones
Pero es ya en nuestro siglo cuando los automatismos empiezan a tomarse un poco en serio y a ser utilizados en aplicaciones prácticas.
Como sucede siempre que la necesidad apremia, durante la Segunda Guerra Mundial, los científicos tuvieron que ingeniárselas para poder manejar sin perjuicio los elementos radiactivos.
Se construyeron con este fin los llamados teleoperadores que, aún lejos de ser robots, son la primera aproximación conseguida por los ingenieros. Se basaban en dispositivos mecánicos que eran capaces de reproducir las acciones realizadas por un operador situado a distancia. El efecto era como tener brazos y manos muy largas.
Algunos años después, los dispositivos mecánicos se sustituyeron por conexiones eléctricas, quedando algo menos ortopédico y más parecido a los robots que conocemos en la actualidad.
Se puede hablar, sin embargo, de una industria de los robots hasta principios de los años setenta.
Joseph F. Engelberger, fue el primero en reconocer el potencial que encerraban las máquinas automatizadas. El mismo Engelberger confesó que fue la lectura del libro YO ROBOT, de nuestro amigo Asimos, la que llevó a dedicar su vida a la robótica.
Engelberger, que por entonces (los años 50) cursaba estudios en la Universidad de Columbia, coincidió en un cóctel con un inventor también apasionado por los robots. Su nombre era George C. Devol.
El espíritu comercial de Engelberger unido a las patentes de Devol dieron como resultado el inicio de una industria que ni siquiera sus creadores pudieron imaginar hasta dónde iba a llegar.
Juntos fundaron la compañía Unimation dedicada a la creación de patentes de máquinas automatizadas. A principios de los años setenta habían diseñado y producido un montón de maquinaria automática de todo tipo.
Pero no tenían resueltos los problemas con las computadoras utilizadas para el control de los robots, por aquel entonces nada manejables y aún demasiado caros. La aparición del microchip acabó con su pesadilla, y a partir de entonces Unimation se convirtió en una de las empresas más rentables de todo el mundo. Por ello se otorgaron Engerlberger y Devol los bien merecidos títulos de "padre" y "abuelo" de la Robótica Industrial.
5.6 El gran boom del imperio
En 1970 se organiza el primer Simposio Internacional de Robots Industriales, ISIR.
Las asociaciones más importantes de esa época eran: JIRA (Japan Industrial Robot Association), la RIA (Robot Industries Association) y la BRA (British Robot Association).
Paralelamente, las patentes y los robots seguían proliferando. Se empezaba a hablar de cálculo de trayectorias, sensorización, retroalimentación y sistemas servodirigidos.
5.7 Algunos nombres y fechas
Tras el primer desarrollo de Unimation basado en una de las patentes de Devol (denominada "dispositivo de transferencia programada articulada") todo fueron robots por aquí y por allá.
En 1962, H.A. Ernst publicó el desarrollo de una mano mecánica controlada por una computadoa. La MH-1 era capaz de "sentir" bloques y apilarlos sin la ayuda de ningún operario. Por la misma fecha, Tomovic y Boni diseñaron otra mano capaz de detectar el tamaño y peso de un objeto.
Como diseñar manos parecía poco, al año siguiente se lanzó al mercado el primer prototipo comercial de bazo articulado. Lo creó la American Machina y Foundry Company, y se llamó VESATRAN.
Algunos años después, en 1968, el Laboratorio de Inteligencia Artificial de Standford decide poner a una computadora ojos y oídos (cámaras y micrófonos) y añadir algo de inteligencia aunque fuese artificial. Los ingenieros de robots ven en este avance la posibilidad de sacar a sus máquinas de la oscuridad y el silencio y no se lo piensan dos veces.
La compañía Kawasaki Heavy Industries negocia una licencia con Unimation y en 1970 desarrollan el primero robot articulado provisto de una cámara y controlado por una computadora. Lo llamaron el brazo Stanford y era capaz de apilar bloques según una estrategia trazada y de forma inteligente.
El éxito obtenido por este proyecto llevó a considerar el control por la computadora y la sensorización como partes fundamentales de un sistema robotizado, y cualquier robot que se preciase, debía incluir ambos.
A partir de la segunda mitad de los setenta todo evolucionó mucho más deprime. Ingenieros de la IBM desarrollaron en 1975 un manipulador inteligente con sensores de contacto y fuerza. En el MIT (Instituto Tecnológico de Massachussets) se trabajaba en aspectos de inteligencia artificial. Y el Jet Propulsión Laboratory desarrollaba técnicas de control sobre el brazo Stanford para proyectos espaciales.
Hay que desmitificar la mala creencia general formada en la sociedad acerca de la palabra "Robot" a raíz de simples películas de ciencia-ficción ya que los Robots no son malvados por naturaleza, sólo son los lo que los hombres quieran que lleguen a ser. Aun así, el mundo del cine ha expuesto a lo largo del tiempo ejemplos de Robots con conductas buenas.

Ilustración 1 -Robot-
Robot fabricado por Toyota
6.1 Definición de robot
Dar una definición concreta de robot no es sencillo. Resulta tan complicado como intentar definir por ejemplo, la diversión o el aburrimiento; se conoce si algo es divertido o aburrido, pero es largo explicarlo con palabras.
Un Robot es un dispositivo generalmente mecánico, que desempeña tareas automáticamente, ya sea de acuerdo a supervisión humana directa, a través de un programa predefinido o siguiendo un conjunto de reglas generales, utilizando técnicas de inteligencia artificial. Generalmente estas tareas reemplazan, asemejan o extienden el trabajo humano, como ensamble en líneas de manufactura, manipulación de objetos pesados o peligrosos, trabajo en el espacio, etc.
Un Robot también se puede definir como una entidad hecha por el hombre con un cuerpo y una conexión de retroalimentación inteligente entre el sentido y la acción (no bajo la acción directa del control humano). Usualmente, la inteligencia es una computadora o un microcontrolador ejecutando un programa. Sin embargo, se ha avanzado mucho en el campo de los Robots con inteligencia alámbrica. Las acciones de este tipo de Robots son generalmente llevadas a cabo por motores o actuadores que mueven extremidades o impulsan al Robot.
La RIA (Robot Industries Association) lo define así: un robot es un manipulador reprogramable y multifuncional, diseñado para mover cargas, piezas, herramientas o dispositivos especiales, según trayectorias variadas y programadas. En resumen se puede decir:
* Su característica fundamental es poder manejar objetos (o sea, manupulador). Un robot se diseña con este fin, teniendo en cuenta que ha de ser muy versátil a la hora de utilizar herramientas y manejarlas.
* La segunda pecularidad que a diferencia de otras máquinas automáticas es su capacidad para realizar trabajos completamente diferentes adaptándose al medio, e incluso pudiendo tomar decisiones. A eso es a lo que se refiere lo de multifuncional y reprogramable.
Los Web bots son conocidos como Robots, pero existen solamente en código, y se mueven a través de páginas Web obteniendo información. Tales entidades son normalmente llamadas agentes de software para ser distinguidos de un Robot que posee cuerpo.
Esta definición está muy abierta, ya que hasta una secadora de cabello satisface este criterio. Por lo tanto, los robotistas han extendido la definición añadiendo el criterio de que los Robots deben ser entidades que lleven a cabo más de una acción. Por lo tanto, las secadoras de cabello y entidades similares de una sola función son reducidas a una Control de problemas.
Así mismo, el término Robot ha sido utilizado como un término general que define a un hombre mecánico o autómata, que imita a un animal ya sea real o imaginario, pero se ha venido aplicado a muchas máquinas que reemplazan directamente a un humano o animal en el trabajo o el juego. Esta definición podría implicar que un Robot es una forma de biomimetismo.
6.2 Marcando diferencias
Existe otra categoría de máquinas llamadas Autómatas Programables muy relacionadas con el mundo de los robots, pero que no pueden confundirse con ellos.
Un Autómata Programable es cualquier máquina electrónica diseñada para controlar en tiempo real un proceso. El autómata carece de inteligencia como tal y reacciona exactamente igual ante sucesos iguales.
Es frecuente que un autómata forme parte de un sistema robotizado, dedicándose a controlar las señales del proceso y dirigiendo las actuaciones del brazo manipulador. Estos robots son completamente mecánicos en sus acciones y, por supuesto, nada inteligentes.
6.3 Clasificación de los robots
Ningún autor se pone de acuerdo en cuántos y cuáles son los tipos de robots y sus características esenciales. La más común es la que continuación se presenta:
1ª Generación. Manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien manual, de secuencia fija o de secuencia variable.
2ª Generación. Robots de aprendizaje. Repiten una secuencia de movimientos de movimientos que ha sido ejecutada previamene por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
3ª Generación. Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un programa y las envía al manipulador para que realice los movimientos necesarios.
4ª Generación. Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían información a la computadora de control sobre el estado del proceso. Esto permite una toma inteligente de decisiones y el control del proceso en tiempo real.
6.4 Clasificación de los robots según su arquitectura
La arquitectura, es definida por el tipo de configuración general del Robot, puede se metamórfica. El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus elementos o subsistemas estructurales.
Los dispositivos y mecanismos que pueden agruparse bajo la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes grupos:Poliarticulados, Móviles, Androides, Zoomórficos e Híbridos.
6.4.1 Poliarticulados
Bajo este grupo están los Robots de muy diversa forma y configuración cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad". En este grupo se encuentran los manipuladores, los Robots industriales, los Robots cartesianos y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el espacio ocupado en el suelo.
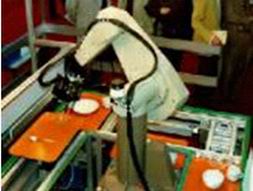
Ilustración 2 - Poliarticulados -
Robot industrial Puma
6.4.2 Moviles
Son Robots con grandes capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores. Las tortugas motorizadas diseñadas en los años cincuentas, fueron las precursoras y sirvieron de base a los estudios sobre inteligencia artificial desarrollados entre 1965 y 1973 en la Universidad de Stranford.
Estos Robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
6.4.3 Androides
Son Robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemática del ser humano. Actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
Uno de los aspectos más complejos de estos Robots, y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot.

Ilustración 3 -Asimo-
6.4.4 Zoomorficos
Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos.
A pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales: caminadores y no caminadores. El grupo de los Robots zoomórficos no caminadores está muy poco evolucionado. Cabe destacar, entre otros, los experimentados efectuados en Japón basados en segmentos cilíndricos biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. En cambio, los Robots zoomórficos caminadores multípedos son muy numeroso y están siendo experimentados en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos terrenos, piloteando o autónomos, capaces de evolucionar en superficies muy accidentadas. Las aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.

Ilustración 4 -Sanddragon, Microbot con ruedas tipo tanque-
6.4.5 Hibridos
Estos Robots corresponden a aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo uno de los atributos de los Robots móviles y de los Robots zoomórficos.
De igual forma pueden considerarse híbridos algunos Robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los Robots industriales.
En parecida situación se encuentran algunos Robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los Robots personales.
Las características con las que se clasifican principalmente
- Propósito o función
- Sistema de coordenadas empleado
- Número de grados de libertad del efecto formal
- Generación del sistema control.
1) Clasificación basada en su propósito o función:
a) Industriales
b) Personales/ Educativos
c) Militares--vehículos autónomos
Los elementos que constituyen un Robot industrial son:
1) Efectores finales Brazos manipuladores Controladores Sensores Fuentes de poder.
2) Clasificación de los Robots basados en las generaciones de sistemas de control.
La primera generación: El sistema de control usado en la primera generación de Robots esta basado en la "paradas fijas" mecánicamente. Esta estrategia es conocida como control de lazo abierto o control "bang bang". Podemos considerar como ejemplo esta primera etapa aquellos mecanismos de relojería que permiten mover a las cajas musicales o a losjuguetes de cuerda. Este tipo de control es muy similar al ciclo de control que tienen algunos lavadores de ciclo fijo y son equivalentes en principio al autómata escribiente de HM Son útiles para las aplicaciones industriales de tomar y colocar pero están limitados a un número pequeño de movimientos.
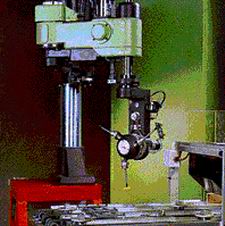
Ilustración 5
En este Robot el efector final consiste de una serie de sensores que puede tener diversas aplicaciones (medición, inspección)
La segunda generación utiliza una estructura de control de ciclo abierto, pero en lugar de utilizar interruptores y botones mecánicos utiliza una secuencia numérica de control de movimientos almacenados en un disco o cinta magnética. El programa de control entra mediante la elección de secuencias de movimiento en una caja de botones o a través de palancas de control con los que se "camina", la secuencia deseada de movimientos.
El mayor número de aplicaciones en los que se utilizan los Robots de esta generación son de la industria automotriz, en soldadura, pintado con "spray". Este tipo de Robots constituyen la clase más grande de Robots industriales en EU., incluso algunos autores sugieren que cerca del 90 % de los Robots industriales en EU pertenecen a esta 2ª generación de control
La tercera generación de Robots utiliza las computadoras para su estrategia de control y tiene algún conocimiento del ambiente local a través del uso de sensores, los cuales miden el ambiente y modifican su estrategia de control, con esta generación se inicia la era de los Robots inteligentes y aparecen los lenguajes de programación para escribir los programasde control. La estrategia de control utilizada se denomina de "ciclo cerrado"
La cuarta generación de Robots, ya los califica de inteligentes con más y mejores extensiones sensoriales, para comprender sus acciones y el mundo que los rodea. Incorpora un concepto de "modelo del mundo" de su propia conducta y del ambiente en el que operan.
Utilizan conocimiento difuso y procesamiento dirigido por expectativas que mejoran el desempeño del sistema de manera que la tarea de los sensores se extiende a la supervisión del ambiente global, registrando los efectos de sus acciones en un modelo del mundo y auxiliar en la determinación de tareas y metas.
La quinta generación, actualmente está en desarrollo esta nueva generación de Robots, que pretende que el control emerja de la adecuada organización y distribución de módulos conductuales.
Fijarse sólo en el brazo articulado de un robot sería como juzgar a alguien única y exclusivamente por el tamaño de su nariz.
Además del brazo, hay otras cuatro partes esenciales en un sistema robotizado que son las siguientes: el controlador, los actuadotes y reguladores, el elemento Terminal y los sensores.
7.1 Las partes de un sistema robotizado
En definitiva, un robot ha evolucionado como una réplica de sus creadores, salvando las distancias. El conjunto guarda cierta similitud con nuestro propio cuerpo.
Manos y brazos se ven reflejados en las partes mecánicas: el manipulador y la herramienta. Los músculos serían los actuadotes y las terminaciones nerviosas, los reguladores.
El cerebro (equivalente del controlador) es el encargado de enviar las órdenes a los músculos a través de las terminaciones nerviosas y de recibir información a mediante los sentidos (sensores).
Finalmente, la manera de pensar y actuar vendría determinada por el software de control residente en la computadora.
7.2 La unión hace la fuerza
Todos los elementos son importantes para el buen funcionamiento del conjunto.
La unión entre cada una de estas partes suelen ser manojos gordísimos de cables que se entrecruzan por todos lados.
7.3 Sistemas realimentados
Nuestros sentidos toman información, que aprovecha el cerebro para dirigirnos correctamente a través de la calle. Este esquema es válido también para un sistema robotizado.
En la ilustración 6 se muestra cómo los sensores del root recogen información y la envían a la computadora para que este pueda conocer con exactitud la situación en cada instante. La computadora procesa los datos recibidos y adapta el movimiento de control realimentado, se dice que el sistema funciona en lazo cerrado.
En cambio, un sistema no sensorizado daría lugar a un control no realimentado y, por tanto, en lazo abierto. Éstos se caracterizan por la falta de adaptabilidad al medio; o, lo que es lo mismo, ante las mismas órdenes de entrada su comportamiento será el mismo, sin tener en cuenta lo que le rodea en esos momentos.
7.4 Proceso completo
Desde que se plantea un problema hasta que se resuelve con la ayuda de un robot, hay que seguir varios pasos:
- Delimitar claramente el problema para decidir si la utilización de un sistema robotizado es conveniente (o sea, si es económico y eficaz).
- Tipo de herramientas que debe utilizar
- Movimientos que ha de realizar
- Velocidad de esos movimientos
- Fuerza que ha de tener
- Método de programación del robot
- Coste y mantenimiento
- Se eligirá el tipo de robot según las características requeridas; esto es:
- Diseño de soluciones con el modelo concreto de robot elegido.
- Fase de pruebas y mejora de las soluciones.
- Implementación real in situ del sistema robotizado y estudio de comportamiento.
Aunque C3PO tenía dos brazos y dos piernas y casi podía correr, nuestros robots actuales no tienen tanta suerte. Generalmente están formados por un brazo que utilizan para manejar las herramientas.
Este brazo y sus herramientas son movidos por dispositivos denominados actuadotes, que pueden ser de origen eléctrico,neumático o bien hidráulico.
8.1 El brazo o manipulador
La estructura mecánica del manipulador puede ser tan variada como los fabricantes que las hacen. Pero generalmente se pueden distinguir cuatro partes principales en el manipulador: el pedestal, el cuerpo, el brazo y el antebrazo. (Ilustración 8).
Las articulaciones entre las distintas partes rígidas del brazo pueden ser giratorias (como las del brazo humano) o deslizantes (si hay traslación de las partes). El número de elementos del brazo y sus articulaciones determinan una característica propia de cada robot. Al número de movimientos espaciales independientes entre sí se le denomina grados de libertad.
8.2 Campo de acción
Debido a la estructura de las articulaciones y al número de ellas existente, el brazo del robot puede llegar a alcanzar ciertos puntos del espacio, pero nunca todos. Al conjunto de los puntos del espacio que el robot puede alcanzar con su herramienta se le denomina campo de acción, y es una característica propia de cada robot.
Los fabricantes nos ofrecen en sus catálogos todo un montón de dibujitos en los que podemos ver las zonas que el robot alcanza y las que no.
8.3 Más características
Hay otras tres características que definen la calidad del movimiento de un robot:
- Resolución (o precisión). Es el mínimo movimiento que puede realizar el robt expresado en milímetros.
- Repetitividad. Es una medida estadística del error que comete un robot al colocarse repetidas veces en un mismo punto.
- Exactitud. Es una medida de la distancia que hay entre el punto donde se ha colocado el extremo del brazo y el punto real donde debería haberlo hecho.
Al igual que nuestro cerebro envía impulsos nerviosos a nuestros músculos para que éstos se muevan, el robot requiere que una computadora central decida qué pasos hay que seguir para llevar a cabo una tarea concreta.
La espina dorsal del robot son los reguladores. Dependiendo del actuador utilizado, el control se realizará a través de un programa o bien mediante programa y circuitos a la vez.
9.1 La función de los reguladores
La misión de los actuadotes es alcanzar un estado determinado cuya referencia le viene impuesta por la unidad de control. Ese estado puede ser bien alcanzar una posición determinada, o bien adquirir cierta velocidad. Si son actuadotes eléctricos (motores) esto se hará girando. Si son hidráulicos o neumáticos, se enviará mayor o menor presión al fluido compresor.
Al controlador principal le interesa que su orden se cumpla exactamente y en el menor tiempo posible, sin que tenga necesidad de ocuparse de ello. Y ésta es la misión de los reguladores.
Ya puedes imaginarte que elegir un robot no es como ir al supermercado y meter en la cesta un kilo de peras. Es necesario conocer a la perfeccion el tipo de aplicaciones donde se van a emplear el robot y cuales han de ser sus caracteristicas.
Campo de acción, grados de libertad, presición, repetitividad, velocidad de movimientos, fuerza, lenguajes de programación, tipos de accionamentos, capacidad de comunicación, mantenimiento y coste son algunas de las caracteristicas con las quenos obsequia un fabricante cuando le pedimos un catalogo. La elección no es fácil.
10.1 Unimation
Americana y fundadora por J. Engerber a principios de los 60, fue la empresa pionera en fabricación de robots industriales.
Los robots mas importantes patentados por Unimation han sido:
Unimate. Es un robot hidraulico, de estructura espacial de tipo polar, que en su version frande (Unimate 4000) es utilizado sobre todo en forja, fundicion y soldadura. Las versiones mas pequeñas (Unimate 1000 y 2000) se utilizan en alimentación de maquinaria y manipulación.
Puma. Los robots Puma son la version electrica de los Unimate. Son articulares y existen varias versiones (Puma 260,560,761 y 762), utilizdas todas ellas en ensamblaje y manipulación.
10.2 Cincinnati Milacron
Es el fabricante mundialmente conocido por sus máquinas herramienta. A partir de 1981 comenzo a fabricar robots eléctricos similares a los de Unimation pero de menor capacidad de carga.
Actualmente tiene dos modelos en el mercado, el T3 y el HT3 (el segundo algo mayor que el primero). Ambos son utilizados en aplicaciones de soldadura y manipulacion.
10.3 ASEA
Esta firma es un ejemplo de que las tecnologías europeas no es nada despreciable. Asea fue una empresa dedicada inicialmente a la construcción de maquinaria eléctrica que, a finales de los 60, desarrollo un robot eléctrico para automatizar sus propios procesos de producción.
Posee una amplia gama de modelos (IRB 60, IRB 90,IRB 1000, etc.), todos ellos de tamaño medio o grande y, por su versatilidad, utilizados en casi cualquier tipo de proceso (mercanizado, fundicion, soldadura, manupulacion, etcétera).
10.4 Hitachi
Esta es una firma japonesa dedicada a una gran variedad de productos, en su mayoría electrónicos. Su división de robótica tampoco se ha queda atrás.
El modelo A 4010 comercializado por esta casa es un robot pequeño, de tipo Scara (coordenadas cartesianas) que se utiliza para manipulación y emsablajes precisos. El modelo Process no es tampoco demasiado grande, es de tipo articulado y se utiliza en el mismo tipo de procesos que el anterior.
Un Robot industrial es un manipulador automático reprogramable y multifuncional, que posee ejes capaces de agarrar materiales, objetos, herramientas mecanismos especializados a través de operaciones programadas para la ejecución de una variedad de tareas como se puede apreciar, estas definiciones se ajustan a la mayoría de las aplicaciones industriales de Robots salvo para las aplicaciones de inspección y para los Robots móviles (autónomos) o Robots personales.
Para Firebaugh un Robot es una computadora con el propósito y la capacidad de movimiento.
11.1 ¿Qué es un Robot Industrial?
Un Robot industrial es una máquina que puede efectuar un número diverso de trabajos automáticamente mediante una programación informática previa. Se caracteriza por tener una estructura en forma de brazo mediante el cual puede usar diferentes herramientas o aprehensores situados como elemento terminal de éste. Además, es capaz de tomar decisiones en función de la información procedente del exterior.
El Robot industrial forma parte del progresivo desarrollo de la automatización industrial, favorecido notablemente por el avance de las técnicas de control por computadora, y contribuye de manera decisiva la automatización en los procesos de fabricación de series de mediana y pequeña escala.
La fabricación en series pequeñas había quedado hasta ahora fuera del alcance de la automatización, debido a que requiere una modificación rápida de los equipos producción.
El Robot, como manipulador reprogramable y multifuncional, puede trabajar de forma continua y con flexibilidad. El cambio de herramienta o dispositivo especializado y la facilidad de variar el movimiento a realizar permiten que, al incorporar al Robot en el proceso productivo, sea posible y rentable la automatización en procesos que trabajan con series más reducidas y gamas más variadas de productos.
11.2 Estructura mecánica de un Robot Industrial:
1.- Manipulador o brazo mecánico.
El manipulador consta de un conjunto de herramientas interrelacionadas que permiten los movimientos del elemento terminal del brazo del Robot. Consta de una base para sujetarse a una plataforma rígida (como el suelo), un cuerpo donde se suele integrar la mayor parte del hardware interno que lo hará funcionar (circuitería, placas impresas, etc.), un brazo para permitir un gran movimiento e 3 dimensiones y un antebrazo para hacer también movimientos en 3 dimensiones aunque diferenciales (muy pequeños) y de mucha precisión, tal que puede llegar a los nanómetros, es decir, a 0'000001mm.

2.- Controlador basado en un sistema computador.
El controlador es un computador que gobierna el funcionamiento de los órganos motrices y recoge la información de los sensores. También se encara de realizar todo tipo de cálculos y tomas de decisión según el programa en ejecución. Gracias a la adaptación de microprocesadores (circuitos integrados que tienen unida la CPU del computador) en los circuitos electrónicos se está mejorando notablemente potencia de los controladores.
3.- Elemento terminal.
En la muñeca del manipulador se acopla una herramienta que será la encargada de desenvolver las tareas. Aunque tiene un peso y medida reducida, a veces debe suportar una elevada carga.
4.- Sensores.
Los Robots de última generación tienen la capacidad de relacionarse con el mundo exterior en tiempo real con el fin de obtener planos de acciones específicas en función de las circunstancias exteriores que los rodean.
1.-Aumentar la productividad.
2.-Evitar la realización de trabajos pesados y repetitivos para el ser humano.
3.-Amortizarse rápidamente por sustitución de la mano de obra obteniendo, así, una mayor duración de las herramientas, más precisión en los trabajos realizados, menos pérdida de material y reducido mantenimiento.
4.-Realización de tareas en condiciones y ambientes peligrosos para el ser humano (hostiles, a muy altas o muy bajas temperaturas, en otros planetas, etc.).
En el contexto actual la noción de Robótica implica una cierta idea preconcebida de una estructura mecánica universal capaz de adaptarse, como el hombre, a muy diversos tipos de acciones y en las que concurren, en mayor o menor grado según los casos, las características de movilidad, programación, autonomía y multifuncionalidad.
Pero en sentido actual, abarca una amplia gama de dispositivos con muy diversos trazos físicos y funcionales asociados a la particular estructura mecánica de aquellos, a sus características operativas y al campo de aplicación para el que se han concebido. Es además evidente que todos estos factores están íntimamente relacionados, de tal forma que la configuración y el comportamiento de un Robot condicionan su adecuación para un campo determinado de aplicaciones y viceversa, y ello a pesar de la versatibilidad inherente al propio concepto de Robot.
12.1 La construcción de un Robot
La construcción de un Robot, ya sea una máquina que camine de forma parecida a como lo hace el ser humano, o un manipulador sin rostro para una línea de producción, es fundamentalmente un problema de control. Existen dos aspectos principales: mantener un movimiento preciso en condiciones que varían y conseguir que el Robot ejecute una secuencia de operaciones previamente determinadas. Los avances en estos dos campos (el primero es esencialmente un problema matemático, y el segundo de tecnología) suministran la más grande contribución al desarrollo del Robot moderno.
Los manipuladores propiamente dichos representan, en efecto, el primer paso en la evolución de la Robótica y se emplean preferentemente para la carga-descarga de máquinas-herramientas, así como para manutención de prensas, cintas transportadores y otros dispositivos.
Actualmente los manipuladores son brazos articulados con un número de grados de libertad que oscila entre dos y cinco; cuyos movimientos, de tipo secuencial, se programan mecánicamente o a través de una computadora. Los manipuladores no permiten la combinación simultánea de movimientos ni el posicionamiento continuo de su efector terminal.
A pesar de su concepción básicamente sencilla, se han desarrollado manipuladores complejos para adaptarlos a aplicaciones concretas en las que se dan condiciones de trabajo especialmente duras o especificaciones de seguridad muy exigentes.

12.2 Robots de última generación
La empresa Sega Toys Ltd. anunció que presentará el 1 de abril un perro Robot, mucho más barato que el de Sony Corp. El Robot de Sega se llamará Poo-Chi y será menos complejo que el AIBO de Sony. Por otra parte, costará el equivalente a 28 dólares mientras que el precio del AIBO era de 2.500 dólares.
Poo-Chi tiene menos capacidad de aprendizaje y menos sensibilidad. Pero responde a la luz, al tacto y el sonido. Un visor colocado en el lugar en que estarían los ojos de un perro verdadero muestra formas diferentes para indicar "estados de ánimo". El "perrito" mide 17 centímetros y pesa 365 gramos, y es alimentado por baterías. Sega espera vender en un año en Japón un millón de unidades.
Como precedente, los 5.000 AIBO que fabricó Sony, a pesar de su precio, se vendieron en cuestión de días. Sony hizo 10.000 más y los vendió durante un "programa de adopción" de una semana en noviembre.

Actualmente contamos con Robots especializados en Televigilancia, Robot que muestran el camino (en museos grandes empresas, etc.) a invidentes y/o cualquier tipo de personas, también posemos una versión de Robot que lee la escritura.
Pero la empresa se dedica también al diseño a medida según las necesidades oportunas de los clientes (mascotas futuristas, por ejemplo juguetes, diseño de Puertas Inteligentes, etc.).
La preocupación de que los Robots puedan desplazar o competir con los humanos es muy común. En su serie Yo, Robot, Isaac Asimov creó las Tres leyes de la Robótica (que más tarde fueron cuatro) en un intento literario por controlar la competencia entre Robots y humanos. Las leyes o reglas que pudieran o debieran ser aplicadas a los Robots u otros "entes autónomos" en cooperación o competencia con humanos han estimulado las investigaciones macroeconómicas de este tipo de competencia, notablemente construido por Alessandro Acquisti basándose en un trabajo anterior de John von Neumann.
Actualmente, no es posible aplicar las leyes de Asimov, dado que los Robots aun tienen una capacidad muy limitada para comprender su significado, evaluar las situaciones de riesgo tanto para los humanos como para ellos mismos o resolver los conflictos que se podrían dar entre leyes.
El Proyecto Universidad Milenio de las Naciones Unidas examina la forma en la que los humanos y los Robots se relacionarán en el futuro. Uno de sus escenarios de análisis, nominalmente puesto en el año 3000, fue llamado "La ascensión y caída del Imperio Robot". En ese escenario, mirando hacia atrás hasta el día de hoy:
Los Robots evolucionaron como los humanos y se volvieron filósofos, bufones, políticos, oradores, actores, maestros, acróbatas, artistas, poetas y pastores de los menos adeptos humanos. La sociedad tuvo un nuevo sistema de castas, y los humanos se convirtieron en una raza tolerada y de alguna manera menospreciados por las máquinas que pudieron desplazarlos y mejorarlos en cualquier medida de fuerza, vitalidad, velocidad y resistencia.
El argumento más importante hecho en la aplicación de la tecnología genética para mejorar el desempeño de los humanos mental y físicamente fue " nosotros tenemos que mantenernos a la par con los Robots". Con los recursos escaseando, la selección natural y artificial comenzó a operar en una manera seria, distribuyendo los recursos disponibles entre aquellos entes que eran los más aptos para explotarlos, en su mayor parte, los Robots. ¿Cómo pudieron los humanos retomar el control? La respuesta fue usar la ingenuidad humana, la creatividad, ocultismo, dedicación y distracción. Tomo algún tiempo, pero funcionó. Esto al final comenzó a estabilizar la población de Robots.
Muchos desechan tal escenario y lo tachan de optimista y muy orientado a la propaganda tecnológica. Hay muchos ejemplos de Robots desplazando humanos, y, las tecnologías integradas en el Robot Depredador y los Misiles Crucero de EEUU son ejemplos altamente sofisticados de inteligencia artificial utilizada para asesinar humanos.
Muchos temen a las Armas de destrucción masiva basadas en pequeños Robots ubicuos.
Aún sin una programación maliciosa, los Robots y los humanos simplemente no tienen la misma tolerancia o conocimientos, conduciendo esto a accidentes: En Jackson, (Michigan) el 21 de julio de 1984, un Robot aplastó a un trabajador contra una barra de protección en la que aparentemente fue la primera muerte relacionada con un Robot en los EEUU. En LongBets, un mercado de futuros, hay predicciones impresionantes que son una autodefensa en contra de que los Robots serán un elemento estándar en este siglo.
Proyecto Autómata Abierto. El propósito de este proyecto es desarrollar software modulare y componentes electrónicos, desde los cuales sea posible ensamblar un Robot móvil basado en una computadora personal que pueda ser utilizado en ambientes de casas u oficinas. Todo el código fuente es distribuido bajos los términos de la Licencia Pública General (GNU).
Los Robots son usados hoy en día para llevar a cabo tareas sucias, peligrosas, difíciles, repetitivas o embotadas para los humanos. Esto usualmente toma la forma de un Robot industrial usado en las líneas de producción.
Otras aplicaciones incluyen la limpieza de residuos tóxicos, exploración espacial, minería, búsqueda y rescate de personas y localización de minas terrestres. La manufactura continúa siendo el principal mercado donde los Robots son utilizados. En particular, Robots articulados (similares en capacidad de movimiento a un brazo humano) son los más usados comúnmente. Las aplicaciones incluyen soldado, pintado y carga de maquinaria.
La Industria automotriz ha tomado gran ventaja de esta nueva tecnología donde los Robots han sido programados para reemplazar el trabajo de los humanos en muchas tareas repetitivas. Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser llevado a cabo por Robots.
Recientemente, se ha logrado un gran avance en los Robots dedicados a la medicina, con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus Robots sean utilizados en procedimientos de cirugía invasiva mínima. La automatización de laboratorios también es un área en crecimiento. Aquí, los Robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores.
Otros lugares donde los Robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas, Robots de tipo artrópodo son generalmente utilizados. Mark W. Tilden del Laboratorio Nacional de los Álamos se especializa en Robots económicos de piernas dobladas pero no empalmadas, mientras que otros buscan crear la réplica de las piernas totalmente empalmadas de los cangrejos.
Robots alados experimentales y otros ejemplos que explotan el biomimetismo también están en fases previas. Se espera que los así llamados "nanomotores" y "cables inteligentes" simplifiquen drásticamente el poder de locomoción, mientras que la estabilización en vuelo parece haber sido mejorada substancialmente por giroscopios extremadamente pequeños. Un impulsor muy significante de este tipo de trabajo es el desarrollar equipos de espionaje militar.
También, la popularidad de series de televisión como "Robot Wars" y "Battlebots", de batallas estilo sumo entre Robots, el éxito de las Bomba Inteligente y UCAVs en los conflictos armados, los comedores de pasto "gastrobots" en Florida, y la creación de un Robot comedor de lingotes en Inglaterra, sugieren que el miedo a las formas de vía artificial haciendo daño, o la competencia con la vida salvaje, no es una ilusión.
Dean Kamen, fundador de FIRST, y de la Sociedad Americana de Ingenieros Mecánicos (ASME), ha creado una Competencia Robótica multinacional que reúne a profesionales y jóvenes para resolver un problema de diseño de ingeniería de una manera competitiva. En 2003 contó a más de 20,000 estudiantes en más de 800 equipos en 24 competencias. Los equipos vienes de Canadá, Brasil, Reino Unido, y EEUU. A diferencia de las competencias de los Robots de lucha sumo que tienen lugar regularmente en algunos lugares, o las competencias de "Battlebots " transmitidas por televisión, estas competencias incluyen la creación de un Robot.
Los Robots parecen estar abaratándose y empequeñeciéndose en tamaño, todo relacionado con la miniaturización de los componentes electrónicos que se utilizan para controlarlos. También, muchos Robots son diseñados en simuladores mucho antes de que sean construidos e interactúen con ambientes físicos reales.
Cuando las Máquinas Imitan a los Hombres
Si bien el hombre ha buscado crear máquinas que puedan realizar las mismas tareas que él, ahora su meta va más allá: lograr que éstas no sólo reproduzcan conductas inteligentes, sino que lo hagan utilizan-do los mismos principios que se han descubierto en los seres vivos y en particular en el hombre.
Esta ciencia llamada Robótica etológica o fisiológica pretende que la naturaleza indique los caminos. Estos Robots permiten a los investigadores entender algunas funciones imposibles de desentrañar directamente a través de la experimentación animal.
Robotica y microcontroladores, robots lenguaje para la ...
Componentes electronicos para la robotica y los microcontroladores, placas de
desarrollo,programadores, micros, motores, componentes varios.
www.micropic.arrakis.es/
Componentes electronicos para la robotica y los microcontroladores, placas de
desarrollo,programadores, micros, motores, componentes varios.
www.micropic.arrakis.es/
Robótica
El siglo XVIII constituye la época del nacimiento de la robótica industrial.
Hace ya más de doscientos años se construyeron unas muñecas mecánicas, ...
www.chi.itesm.mx/~cim/robind/robotica.html
El siglo XVIII constituye la época del nacimiento de la robótica industrial.
Hace ya más de doscientos años se construyeron unas muñecas mecánicas, ...
www.chi.itesm.mx/~cim/robind/robotica.html
Robótica - Wikipedia
La historia de la robótica ha estado unida a la construcción de ... El término
robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a ...
es.wikipedia.org/wiki/Robótica
La historia de la robótica ha estado unida a la construcción de ... El término
robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a ...
es.wikipedia.org/wiki/Robótica
La Robótica - Monografias.com
La mayor parte de la gente tiene una idea de lo que es la robótica, ... La robótica
como hoy en día la conocemos, tiene sus orígenes hace miles de anos. ...
www.monografias.com/trabajos6/larobo/larobo.shtml
La mayor parte de la gente tiene una idea de lo que es la robótica, ... La robótica
como hoy en día la conocemos, tiene sus orígenes hace miles de anos. ...
www.monografias.com/trabajos6/larobo/larobo.shtml
Tres leyes de la robótica - Wikipedia
En la ciencia ficción las tres leyes de la robótica son un conjunto de leyes ...
Según el propio Asimov, la concepción de las leyes de la robótica quería ...
es.wikipedia.org/wiki/Tres_leyes_de_la_robótica
En la ciencia ficción las tres leyes de la robótica son un conjunto de leyes ...
Según el propio Asimov, la concepción de las leyes de la robótica quería ...
es.wikipedia.org/wiki/Tres_leyes_de_la_robótica
15. Anexo
El lanzamiento de un robot capaz de moverse, interactuar con los seres humanos y ayudarles es, sin duda, una de las mayores proezas tecnológicas del siglo XIX.
El compromiso a largo plazo de Honda en el desarrollo de robots humanoides se inició hace dos décadas, y ha sido motivado por el deseo de sus ingenieros de responder a un desafío mecánico y técnico excepcional en el ámbito de la movilidad.
Honda creó su primer robot andador en 1986. El ambicioso programa que siguió a esta creación corresponde perfectamente a la filosofía Honda: esforzarse por explotar los potenciales de la tecnología punta a fin de mejorar el día a día de las personas.
El objetivo de Honda es crear un robot humanoide capaz de interactuar con las personas y de ayudarles haciéndoles la vida más fácil y agradable. Aunque todavía estamos lejos de poder atribuir roles concretos a los robots humanoides, podrían utilizarse, por ejemplo, para ayudar e incrementar la autonomía de las personas con minusvalías y de las personas mayores. Evidentemente, todavía tienen que transcurrir muchos años hasta que se pueda cumplir este objetivo, pero algunas empresas de Japón ya utilizan los servicios de ASIMO para funciones promocionales como la recepción de visitantes.
Uno de los robots bipedos mas evolucionado del mundo
ASIMO (acrónimo de "Advanced Step in Innovative MObility") es considerado uno de los robots bípedos más evolucionados del mundo.
Para conseguir los movimientos de ASIMO, Honda ha estudiado y utilizado como modelo los movimientos coordinados y complejos del cuerpo humano. Las proporciones y la posición de las articulaciones de ASIMO se parecen a las de un ser humano y, en la mayoría de los aspectos, el robot realiza un conjunto de movimientos comparables a los nuestros.
Gracias a un nuevo sistema de movilidad avanzado que ha implantado Honda, ASIMO no sólo puede avanzar y retroceder, sino que también se desplaza lateralmente, sube y baja escaleras y se da la vuelta mientras anda. En este aspecto, ASIMO es el robot que mejor imita los movimientos de avance naturales de los seres humanos.
En la base de este sistema se encuentra el "avance inteligente", una aplicación de Honda que permite a ASIMO andar en tiempo real con unos movimientos muy suaves. Esta capacidad ha sido posible gracias a una función que permite que el robot prevea su próxima posición y adapte sus movimientos en consecuencia. Así, a semejanza de un ser humano que, al girar una esquina, se inclina para desplazar su centro de gravedad hacia el interior, ASIMO prevé los pasos que va a tener que realizar y ajusta su centro de gravedad de forma adecuada.
Esta capacidad de previsión de los próximos movimientos en tiempo real también le permite andar de forma continua. Para trazar una curva, no tiene que detenerse, pivotar y retomar la marcha. Puede realizar esta trayectoria con un solo movimiento suave e ininterrumpido.
ASIMO : hacia el robot inteligente
Además de los importantes avances realizados en el ámbito de la movilidad, el programa de investigación de Honda se ha concentrado en el desarrollo inicial de un comportamiento inteligente de ASIMO.
Honda define la inteligencia como la "capacidad de establecer estrategias de resolución de problemas para lograr un objetivo concreto mediante el reconocimiento, el análisis, la asociación y la combinación de datos, la planificación y la toma de decisiones". Honda es la primera en reconocer que ASIMO todavía dista mucho de tener todas estas capacidades, pero considera que se han realizado avances importantes.
Además de las capacidades cognitivas asociadas al sistema de "avance inteligente", las versiones de ASIMO que se están desarrollando en Japón cuentan con varias funciones inteligentes, entre las que destacan la capacidad de reconocer a personas, objetos y gestos, calcular las distancias y el sentido de desplazamiento de varios objetos.
Estas informaciones visuales se registran, interpretan y traducen en acciones. Gracias a estas funciones, ASIMO puede evitar los objetos que se encuentran en su camino, saber que alguien quiere darle la mano y actuar en consecuencia tendiéndole la suya.
En cierta medida, ASIMO también puede entender y hablar. Puede reconocer voces, distinguir sonidos y palabras, responder a determinadas instrucciones e intercambiar frases simples y saludos con una persona. Actualmente, ASIMO puede entender 50 saludos y tratamientos distintos, así como 30 instrucciones, y actuar en consecuencia.
Asimo: Novedades
Tokio, 15 de diciembre de 2004 --- Honda Motor Co., Ltd., ha anunciado hoy el desarrollo de nuevas tecnologías para el robot humanoide ASIMO de nueva generación, con las que quiere conseguir un nuevo nivel de movilidad que permitirá que ASIMO funcione e interactúe mejor con los seres humanos gracias a un rápido procesamiento de la información y una actuación más ágil en entornos reales.
Entre las tecnologías clave se encuentran las siguientes:
1) Tecnología "Posture Control" (control de postura) que hace posible correr de forma humana
La combinación de un hardware muy receptivo con la nueva tecnología "Posture Control" permite que ASIMO flexione el torso para mantener el equilibrio y evitar los patinazos y giros en el aire, que suelen estar vinculados a los movimientos rápidos. Actualmente, ASIMO puede correr a una velocidad de 3 km/hora. Asimismo, la velocidad de avance caminando ha pasado de 1,6 km/hora a 2,5 km/hora.
2) Tecnología "Autonomous Continuous Movement" (movimiento continuo autónomo) que permite una ruta flexible hacia el destino
El ASIMO de nueva generación puede maniobrar para acercarse a su punto de destino sin tener que detenerse para comparar la información del mapa de input con la obtenida de la zona en la que se encuentra mediante el sensor de superficie de suelos. Además, ASIMO puede modificar autónomamente su ruta cuando dicho sensor de superficies y los sensores visuales situados en su cabeza detectan obstáculos.
3) Tecnologías de sensor visual y de fuerza mejoradas para una mejor interacción con las personas
Al detectar los movimientos de las personas mediante los sensores visuales situados en su cabeza y los sensores de fuerza (quinestésico – kinesthetic*****) que se acaban de añadir a sus muñecas, ASIMO puede moverse en sincronía con las personas y puede dar o recibir un objeto, dar la mano de forma acorde con el movimiento de la persona y avanzar o retroceder como respuesta a la dirección en que se tira de su mano.
Especificaciones técnicas clave del nuevo modelo:
1. Velocidad al correr: 3 km/hora (tiempo en el aire: 0,05 segundos).
2. Velocidad normal al andar: modelo actual, 1,6 km/hora; nuevo modelo, 2,5 km/hora.
3. Altura: 130 cm (modelo actual: 120 cm).
4. Peso: 54 kg (modelo actual: 52 kg).
5. Tiempo de funcionamiento continuo: 1 hora (modelo actual: 30 minutos).
6. Grados de libertad en funcionamiento: 34 grados de libertad en total (modelo actual: total, 26).
- Articulación de rotación de cadera: Se ha conseguido una mayor velocidad al andar gracias a la rotación proactiva de las caderas, además del balanceo de los brazos, que contrarrestan la fuerza de reacción que se genera cuando las piernas avanzan al correr o andar.
- Articulación de flexión de la muñeca: Dos ejes adicionales en cada muñeca permiten que el movimiento de la zona de la muñeca sea más flexible.
- Articulación del pulgar: Antes, los cinco dedos funcionaban con un mismo motor. Ahora, con la adición de un motor que acciona el pulgar de forma independiente, ASIMO puede sostener objetos de varias formas.
- Articulación del cuello: Se ha mejorado la expresividad de ASIMO utilizando un eje adicional en la articulación del cuello.
Leer más: http://www.monografias.com/trabajos31/robotica/robotica.shtml#ixzz2pFgt2J7t
No hay comentarios:
Publicar un comentario