En Revolución de la Robotica Educativa...
Actualmente las
nuevas tecnologías juegan un papel importante en el proceso de enseñanza aprendizaje, siendo los países desarrollados los pioneros en la inclusión de ellas, los cuales han transitado hacia nuevos modelos educativos, tales como los sustentados en la
promoción de la
creatividad mediante el uso de la
robótica [2-4].
En lo que a estos nuevos conceptos de enseñanza aprendizaje se refiere, se incluye la realización de robots para facilitar
el trabajo académico, empleando dichos robots como herramienta para enseñar y aprender sobre la
ingeniería mecatrónica y la robótica [5].
En este orden de ideas se plantea la robótica educativa como una actividad transdisciplinar, que representa una alternativa
didáctica, que de forma paralela a los
métodos ya establecidos, desde la perspectiva instrumental, mediante el
desarrollo de
sistemas robóticos con fines didácticos, permite
el aprendizaje en el que los estudiantes encuentren circunstancias favorables para la
construcción de conceptos y de su
interpretación personal de la realidad. Sin embargo, el planteamiento y desarrollo de las prácticas debe estar guiado por personal con formación en
didáctica y
pedagogía, que aporte su
conocimiento y experiencia en el ámbito educativo [6, 7].
La
educación en ingeniería ha cambiado drásticamente debido a la intervención de herramientas de
simulación, tales como Matlab y Simulink, la cual permite la solución de
problemas complejos a través de una vía fácil. El crecimiento de la
tecnología web, ha permitido la incorporación de estas herramientas computacionales para facilitar el aprendizaje a distancia. Un ejemplo de esto es el desarrollo de laboratorios virtuales a distancia y laboratorios reales a distancia.
Los laboratorios virtuales a distancia están basados en un
sistema de simulación
física en un punto remoto a través de la animación computarizada y el uso de
software especializados, dichos sistemas físicos pueden ser representados en un grafico o de manera analítico. Mientras en un
laboratorio real a distancia el usuario interactúa con el dispositivo real en un punto remoto, usualmente el usuario cambia parámetros de
control, hace
experimentos, ve los resultados y baja los
datos del experimento a través de una interface web [8, 9].
En Universidades como la
Escuela Superior de Ingenieros Industriales de Vigo,
España, la enseñanza de la robótica y de sus aplicaciones, se complementa con prácticas de laboratorio y con un
trabajo opcional de robótica móvil, realizado en
grupo, empleando un kit didáctico del robot Scorbot [10].
Figura 0. Robot scorbot.
Tal como lo señalado anteriormente, en la
Universidad de Alicante, España, se emplea el sistema denominado ROBOLAB para las prácticas más relacionas con la robótica, el cual está disponible a partir de la
página web de la universidad. ROBOLAB se conecta con un robot Scorbot, a través de un
servidor. A través de este laboratorio virtual se desarrollan tres prácticas; aprendizaje del uso de ROBOLAB,
algoritmos de visión artificial y
diseño de trayectorias para robots.
El laboratorio virtual permite que el alumno realice primero sus ejercicios en el simulador, y después, tras comprobar que los resultados de la simulación son correctos, puede probarlos sobre el sistema real mediante una opción de tele-operación.
Los resultados más relevantes obtenidos del estudio realizado radican en el beneficio y el aumento en el
interés, reportado en los estudiantes, que produjo la posibilidad de acceso a herramientas y
recursos de alto coste como es el caso de los robots, porque con ello las prácticas resultan más atractivas y amenas. Además que el uso de la herramienta Robolab garantiza el buen uso del sistema real, aumentando así su vida útil [11].
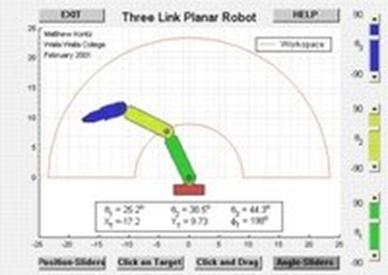
Mientras que en la asignatura, Control y
Programación de Robots, impartida en la escuela de
Ingeniería Industrial, de la Universidad de Sevilla, la
metodología de enseñanza-aprendizaje se corresponde con sesiones académicas prácticas aunado el trabajo de laboratorio tutorado y debidamente programado con las herramientas Matlab y Robotics Toolbox, consideradas como estándares básicos para la simulación de sistemas robóticos [12].
Figura 3. Vista de Robotics Toolbox de Matlab.
En ese orden de ideas, en La Universidad de La Serena, Chile, para el laboratorio de las asignaturas de control automático y de
electrónica de la carrera de ingeniería
mecánica; se diseño un robot móvil de bajo
costo, denominado ULS-01, con la finalidad de aplicar algoritmos de navegación existentes y desarrollar algoritmos que permitan, a través de la inserción de nuevas tecnologías, mejorar el proceso de enseñanza aprendizaje de ambas asignatura [13].
En
Colombia, el desarrollo de
proyectos de
investigación relacionados con la incorporación del diseño e implementación de plataformas robóticas móviles, se ha incrementado en esta última década, mediante el desarrollo de robots experimentales, entre los que puede citarse el E-SMART [1].
Figura 5. Plataforma del proyecto SMART.
E-SMART es una plataforma robótica móvil, desarrollada por la Universidad Nacional de Colombia, sede Medellín, concebida para la enseñanza de la robótica, esta dotada de un conjunto de elementos, tanto de
hardware como de software, que permite la enseñanza de manera remota, a través de un laboratorio remoto.
La Universidad Católica
Andrés Bello, en
Venezuela, a través de su
programa IERE, Inter-Escolar de Robótica Educativa, promueve la adquisición y desarrollo de habilidades para la resolución de problemas concretos lo hace mediante la activación de los
procesos cognitivos y sociales que propicien un
aprendizaje significativo y fomenten el desarrollo del
pensamiento que les permitan a los estudiantes dar respuestas al entorno cambiante del mundo actual [14].
Las
industrias, tales como Lego y Fischertechnik, han propuesto kits para la construcción de robots, con el deseo de estimular el aprendizaje de conceptos y métodos relativos a áreas tales como la
mecánica,
informática y
electricidad.
El kit básico de LEGO MINDSTORMS NXT, está compuesto por un controlador, un conjunto de cuatro
sensores, el
comportamiento del robot se programa en el Mindstorms NXT Software y se carga luego en el robot. El kit Mindstorms LEGO es usado ampliamente como herramienta para el desarrollo de la creatividad en los colegios y en algunos casos en los primeros años de pregrado [15, 16].
Figura 6.Bloque NXT, sensores y actuadores.
En tres
instituciones educativas del departamento de Boyacá, Colombia se
empleo la plataforma robótica educativa denominada AMIBOT, la cual consiste en un robot móvil de configuración diferencial, construido con el set de piezas del kit de robótica Lego Mindtorms™ NXT, como apoyo a los procesos de enseñanza y aprendizaje en los niveles de
educación preescolar y educación básica primaria.
Figura 7.Robot AMIBOT.
Las actividades se centraron en el reconocimiento de
colores, números y figuras geométricas, en las tres actividades y en los tres niveles de escolares, la novedad y diversión fueron aspectos predominantes en la actividad. Una vez conocido el robot, y entendidas las preguntas, las respuestas fueron acertadas en cada grupo de trabajo con masiva participación.
Figura 8. Actividad con los escolares.
Durante las actividades realizadas, los
docentes manifiestan desconocimiento en el manejo de herramientas didácticas que usen tecnologías recientes, por lo que se hace relevante la
capacitación de los mismos, ya que muestran interés e iniciativa en el complemento de sus clases con herramientas que hagan uso de la tecnología [6].
Fischertechnik ofrece una plataforma con la que es posible construir modelos robustos y realistas de robots. Su programación se realiza con el software ROBO Pro-Software que es proporcionado por el fabricante al comprar el
producto. Esta plataforma, al igual que, el kit Mindstorms de LEGO, se emplea a nivel educativo [17].
Figura 9. Robot Mobile Set 93292.
Incluso el Instituto Tecnológico de Massachusetts desarrollo el Handy Board, el cual es un sistema usado como herramienta educativa para la construcción de minirobots. Se compone de un
procesador, una
memoria RAM, 4 salidas para el control de
motores DC, una pantalla LCD y un
bus de conexión para diferentes clases de sensores, con nueve entradas digitales y siete analógicas [1].
Figura 10. Fotografía de Handy board.
Un caso importante de resaltar es el caso del Taller de prueba para programación de robots dirigido a
niños panameños de 9 años a 15 años, desarrollado en
Panamá. En él se emplea la enseñanza de la robótica a niños con Software y Hardware de bajo costo con el único fin de motivar y cultivar la curiosidad de los niños con la electrónica y la
ciencia.
El taller empleando un software, de una forma sencilla y emocionante, desarrollado con la intención de acercar, de una manera trasparente al usuario, enseña los fundamentos de la programación aplicado a un contexto físico como puede ser un robot o cualquier sistema de
automatización.
Figura 11. Actividades de programación.
Esta experiencia a permitido que los jóvenes y niños aprenden a programar e interactuar con la placa (
cerebro) robótico. Encender luces a través de la programación de la placa. Conectar sensores de proximidad y seguimiento de línea. Conectar un
motor y programar el
movimiento del robot. Lo cual capacita a los niños sobre la construcción y programación del Robot [18].
Si bien, ha comenzado la transición de los países desarrollados hacia nuevos modelos educativos basados en el fortalecimiento de la creatividad mediante el uso de la robótica, en Venezuela, la compra o adquisición de una de estas plataformas robóticas generalmente trae asociados altos
costos, por trámites de
importación, adquisición de repuestos, licencias de software propietario, soporte técnico, etc. Situación que en muchos casos se considera como incentivo al impulso del desarrollo de robots con tecnología accesible [3].
La principal vertiente en los proyectos de robótica educativa a nivel universitario se centra en el desarrollo de
proyectos de investigación que permitan, desde un punto de vista mas general, la implementación de prácticas, que permitan incentivar y motivar al estudiante en el aprendizaje de conocimientos asociados a los sistemas de control y robótica en general [19].
A niveles más avanzados se consideran como aspectos principales, la prueba y validación de arquitecturas de control de robots, examinar algoritmos de control de navegación autónoma, semiautónoma y con diferentes configuraciones de sensores, actuadores y demás dispositivos electrónicos